Various notes (crib sheet) from trying to understand various things... really just stuff you'd find in any old math text book. Oh and this is a useful MathJax reference on StackExchange. And Detxify can be used to draw the symbol you're looking for! For an interactive view of your mathjax try here. For graphing functions try Desmos.
Page Contents
References and Resources
The following are absolutely amazing, completely free, well taught resources
that just put things in plain English and make concepts that much easier
to understand! Definitely worth a look!
The point of partial fractions is to do the reverse of:
In other words, given the following,
Partial fractions let us go back to,
We would start this by first factoring the above to get,
We know that we want to get to something like,
We can remove the denominators by multiplying through by to give,
Matching terms between and , we get,
Solving these simultaneous linear equations, we get,
And so we can get back to
Yucky example, sorry!
Summary Of Partial Fraction Rules
Numerator must be lower degree than denominator. If not, then first divide out.
The "cut the knot" website lists some excellent proofs of the fundamental
Pythagorean Theorem
Basics
Some trig functions are "complementary" in the sense that a in pair of such functions, one equals the other shifted by 90 degrees ( radians).
So, "cos" is "complementary sine", for example, and "cot" is "complementary tan". The one that doesn't quite fit this
pattern is the "csc" and "sec" complements :'(...
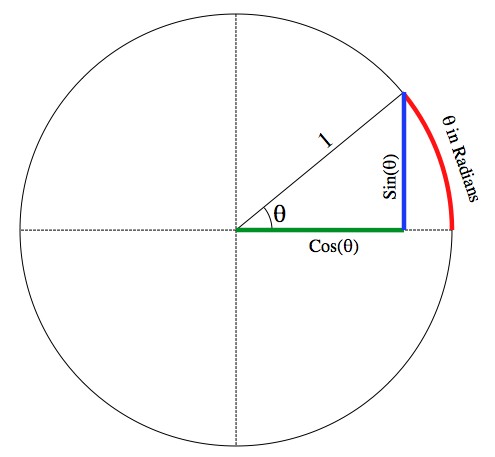
Radians
Here is a fantastic page about the why of radians. In summary
radians define a circle such that the angle measured in radians is also the arc length around the unit circle for that arc.
Why?
Re-order as (just moved the around):
Now, let
Then we can re-write the above as:
Oh! We have written in terms of :
This means that if we had something like we can say it equals .
We know and now, in this case they are and respectively.
We have to use these to find and . Now for some trickery...
Thus,
OK, we have . From our little example above it would be . It is conventional to choose only the positive square root, and hence R will always be positive.
Now lets get
Thus:
Which in our little example is degrees.
Interestingly, using the exact same logic we can arrive at:
Here we will end up with the same definition for :
But the angle is:
The relationship between the two being:
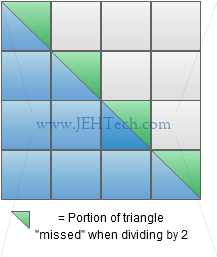
Consider summing the numbers in the series . For each number in the series, imagine stacking blocks to the left of the last stack.... you'd build up the triangle shown to the left. It's basically one half of a square. Trouble is if you divide the square by 2 you would chop off the top half of each block at the top of its stack. Therefore for each number in the series you have "lost" half a block.
Therefore the total number of blocks is...
Where is half of the square and is the total of all the halves that we "cut" off (but didn't mean to) when we took the half.
Therefore, we can say...
And...
Arithmetic Progression
Geometric Progression
If , then as , ,
Or, if (useful for the z-transform), then
Binomial Theorem
The binomial theorem is summarised as...
Where the nth term is given by the following equation.
Exponential Series
The exponential series is defined as...
This is why
The constant can be expanded as follows...
And powers of as ...
Malclauren's Theorem
Attempts to express a function as a polynomial.
Note that the series must be shown to converge.
Need to figure out the coefficients. Notice the following.
Notice then...
And so on...
It thus looks like, and indeed is the case, that:
The above definition can then be used to derive the expansion
of , which is why we were able to say:
Remember, the series must be shown to converge! This is easily seen because
the denominator is growing at a faster rate than the numerator.
Using this we can derive Euler's Formula.
Summing the above two expansions we get...
Doing a similar expansion for we get the following and can then see how we get Euler's formula...
Imaginary & Complex Numbers
Intro
The definition of a imaginary number, , is , which is also often seen written as . It's called "imaginary"
because the square root of -1 doesn't exist in real terms: there is no real number that when multiplied by itself is negative. Thus, the
set of real numbers has been "extended". Sometimes is used instead of to denote an imaginary number.
A complex number is one that has a real and imaginary part, even if the real part is zero. Thus real numbers are a subset of complex numbers.
Rectangular Form
In rectangular form we write complex numbers like this: , where and are real numbers.
If then it we can write and .
The representation of a complex number as is called rectangular form.
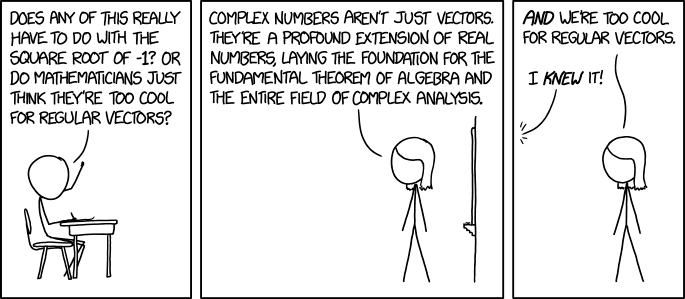
A complex number can be viewed graphically on an argand diagram, which is a little like a Cartesian diagram, except
the horizontal axis is the real component and the vertical axis is the imaginary component of the complex number:
Add
Subtract
Multiply
Divide
Need complex conjugates for this. See below...
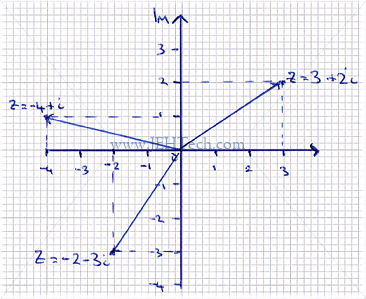
Complex conjugates. The complex conjugate of is defined as
(where and are just two different notations
that mean the same thing). The can be visualised as shown below:
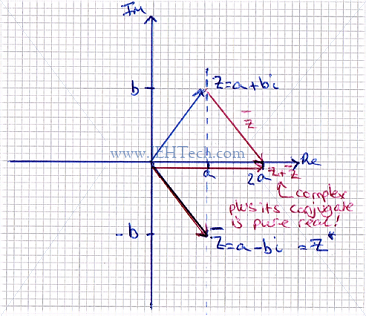
The next thing to talk about is the magnitude of a complex number. In the above
diagrams we can see that the vector forms a right-angled triangle with the horizontal axis.
The magnitude is the length of the vector and this is defined as follows:
Polar Form
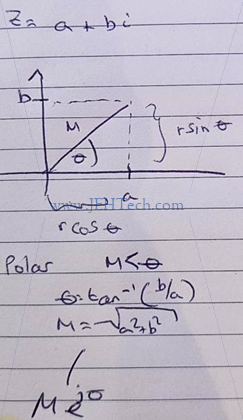
Complex numbers can also be written in polar form by specifying magnitude (distance
from the origin) and angle:
How do we go from rectangular form () to polar form ()?
Recall and that therefore .
We already know row to calculate .
Lets do a quick example. Let :
Thus, in polar form the complex number is expressed as .
Exponential Form
From polar form we go to exponential form.
This means that we can re-write as
And using Euler's amazing formula ,
we can write...
This is the exponential form. It is especially useful if you want to do
division of complex numbers.
We can go back from exponential form to rectangular form using the same two
formulas we saw above: and .
Taking the example from the previous section where we saw that we could represent
as , we can now see this is easily converted to exponential form: .
And, if we wish to go back we can see that (approximately because the 0.983 value is rounded).
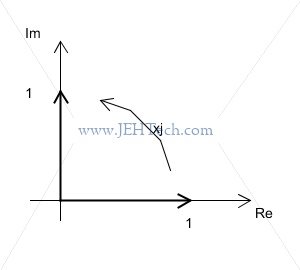
The exponential form is particularly useful in subjects like DSP for doing things like changing a signal's phase, which ends up just being a multiplication like this:
The number is rotated anticlockwise by radians!
To explain a little more clearly, a discrete complex exponential is generally represented as:
Where is the angular frequency is radians per sample period, is the amplitude and is the initial phase of the signal in radians. If we had to do a phase shift of the signal we'd either have to remember a whole load of trig identities or use the complex exponetial form, which makes life easier...
We can see this very simply by noting the following:
The phase shift has become just multiplication.
Multiplying By j Rotates 90 Degrees Anticlockwise
Multiplying a real or complex number by rotates it, in the complex plan, by 90 degrees
anticlockwise, whilst dividing by rotates in 90 degrees clockwise.
This is because , so , hence the 90 degree rotation (recall ).
Polar to Rectangular and Back Again
Polar to Rectangular
The polar form in rectangular form is , where and are calculated like this:
Rectangular to Polar
The rectangular form can be converted to the polar form this way:
But, there are two solutions to the arctan solution. Both are correct, but the correct one for this conversion
has to be chosen. Use the sign of the real part, , to decide.
The reason for this is that the tangent has a period of :
Which means that there are always two angles, 190 degrees apart, that give the same value of .
The ratio only gives the slope of the line from the origin to the point. It does not say which quadrant the point is in.
The sign of x determines whether the point lies in:
Quadrant I or IV, where x is positive
Quadrant II or III, where x is negative
The principal arctan function returns values only in
That range corresponds only to Quadrants I and IV. So:
If x is positive, the arctan result is already correct.
If x is negative, the true angle must lie in Quadrant II or III, so you add pi.
Addition, Subtraction, Multiplication, Division
To multiple or divide complex numbers, convert them to exponential form and use:
This is much simpler than tring to multiple in rectangular form
To add or subtract convert to rectuangule form and use:
Phasors
A phasor is a complex number used to represent a sinusoid at a point in time. I.e., they represent the amplitude and phase of a sinusoid with the time dependence removed.
Using Euler:
Now consider this sinusoid:
Substiute for and we get:
So, now we can say
Because the phasor represents the sinusoid at a point in time, the bit is giving us the frequency (the rate at which this phasor would rotate) and
gives us the starting phase, or offset, if you like at .
So, to encode the phase and magnitude of a sinusoid we use the phasor:
This phasor contains only magnitude and phase. It does not contain the time variation. The time variation has been factored out.
This means we can now write:
Which is, summarised:
Thus, to reconstruct the actual time domain signal, we must multiply the phasor by to restore the sinusoidal time dependence that was removed when forming the phasor.
This awesome GIF is produced by
RadarTutorial.eu, although I couldn't find it on their site.
I originally found the image on this forum thread and the
watermark bears RadarTutorial's site address (it's not too visible on the white background of this page).
Why Is This Helpful?
A motivating example. Simplify first without using phasors, then using phasors...
Without Phasors
Using the trig identity for :
And,
So,
Oh good lord this is already painful. Now we need the identity (see trig rules section):
And we get alpha as:
Blimey! (Also bugger sign is wrong, need to figure out why - TODO)
With Phasors
We saw that we can write as the real part of the phasor . Thus we can encode
as and as . Except, for the
calculation we'll keep both real and imaginary parts then remove the imaginary at the end...
As per the guide above, to add complex numbers we go to rectangular form.
Add the rectangular forms:
Then go back to exponetial form:
Se we end up with
Factoring frequency back into the phasor gives
The real part of which is
Was that easier than the trig way? Yeah maybe a little friendlier. Certainly didn't have to remember a load of trig
identities and know that specific route through the trig solution which meant knowing exactly which identities to
apply and how to get the right result. So yeah... actually way simpler. Nice!
Combinations & Permutations
Selecting samples from a set of samples at random. If the order of the elements matters then it is
a permutation, otherwise it is a combination.
If I have a set of objects and I select objects, on the first selections I can choose from
objects. For the second selection I can choose from objects. This looks like the beginning of
a factorial, but the factorial would look like this.
We only want the first 2 terms. To get rid of the remaining terms we need to divide by , in
other words, . Hence the formula above.
With combinations the order is not important. This time take ... for every choice I make there will be
permutations with the same elements, which is one combination (as order is now not important). This
is the case because the 3 elements can be ordered any how and count as the same object. and
are, for example, no different. Out of all sets containing only these elements there must be permutations. Therefore need
to get rid of this count from by divifing by in the general case...
For a fairly explicit example of combinations v.s. permutations and their
application in statistics see
this little example.
When we talking about the limit of a function, we are asking what value the function will give as the
input gets closer and closer to some value, but without reaching that value. The animation below
tries to explain this:
What you should see in the animation is that we can always get closer to the point without ever
reaching by adding smaller and smaller amounts. In other words, you can get as
close to the limit (in the above case 9) by getting sufficiently close to some input (in the
above case 3)
Intuitively,
If is defined near, but not necessarily at, , then will approach
as approaches . More rigorously, let be defined at all in an open interval
containing , except possibly at itself. Then,
If and only if for each , there exists such that if
then .
I.e., no matter how close to we get, there is always a value of arbitrarily close to the limit value, , but which is not , that yields this value close to .
Ie. We can pick a window around the y-axis value and if we keep shrinking this window,
we will always find an value, either side of that will yield a y-value in this
error window. So, the error can be arbitrarily small and we will always find an either side
of to satisfy it :) This is the two sided limit.
Limit Properties
Most of these are only true when the limits are finite...
Uniquness:
If and then
Addition:
Scalar multiplication:
Multiplication:
Division:
Powers:
Ways To "Solve" Limits
If the limit is not of the form , i.e., tends to some known number, first try pluggin that number into the
equation. If you get a determinate answer thats great.
Generally though we get an indeterminate answer because we get a divide by zero...
If you can transform the function you're taking the limit of to something where there is no longer a divide by zero, note
that original function and the transform are not exactly identical. Let's say the original function is and you have
transformed it to .
If and at is indeterminate, our transform to is not. This means and are not the
same function. But because limits are only concerned with values near and not at, this is okay
as the functions are identical everywhere else.
When numerator non-zero but denominator zero, there is at least one vertical asymptote in your function. Either the limit
will exist here or you will only have a left or right sided limit if on one side the y-axis tends in the opposite direction
to the other side of the asymptote.
Factor Everything
If then factor to and cancel out the
denominator. You can also use the difference of two cubes to help with more complex functions: .
Get Rid Of Square Roots
For problems where , where a is not you get rid of square roots by multiplying by the conjugate.
If you have you multiply by . If you have you multiply by :
Now when , hopefully you won't have an indeterminate fraction!
Rational Functions
When , the leading term dominates. If then the leading term is . Putting , we say
that...
This does not mean that ever equals , just that the ratio of the two tends to one as tends to
infinity!
If you are taking the limit of a rational function like the one below...
... you can't just substitute infinity for because you
get which doesn't make a lot of sense...
So do this...
We know that because the leading term dominates...
Which means that we will really be looking at the limit of...
... as tends to infinity!
A numerical example. Solve
So we do...
Everything tends to one except , which is equal to , so we know that this tends to zero!
In general, for our polynomials and :
If degree of n == degree of d, then limit is finite and nonzero as
If degree of n > degree of d, then limit is or as as
If degree of n < degree of d, then limit is 0 as
N-th Roots...
When there are square roots, or indeed n-th roots in the equation the leading term idea still works. All that happens is that
when you divide the n-th root by the leading term you bring it back under the square root.
Be careful when because when is negative! It equals . Use the following rule.
If you write...
You need a minus in front of when is even and is odd.
The Sandwich Principle / Squeeze Theorem
If for all x near a, and , then too.
Sal on Khan Achademy gives a good example of using the squeeze theorem to solve the following limit.
The limit cannot be defined at , so the function is not continuous at that point, but it can still
have a limit as tends to 0, as it does not have to equal 0... we only have to be able to get
arbitrarily close.
L'Hopital's Rule
Can be summarised as follows...
L'Hopital's rule can be used when the normal limit is indeterminate. For example...
Substituting in gives , which is indeterminate. So, apply L'Hopital's rule by
differentiating numerator and denominator separately...
Substitute in for gives . Therefore...
Trig functions
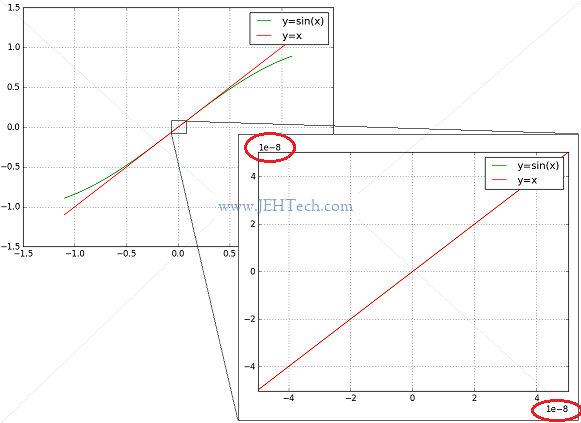
For small values of , and are approximately the same. For really small values, I'm not even
sure my computer has enough precision to be able to accurately show the difference. But, using a small python script
we can get the idea:
The above image was generated using the following script:
import matplotlib.pyplot as pl
import numpy as np
x = np.arange(-0.0001,0.0001, 0.000001)
y_lin = x
y_sin = np.sin(x)
pl.plot(x,y_sin, color="green")
pl.plot(x,y_lin, color="red")
pl.grid()
pl.legend(['y=sin(x)', 'y=x'])
pl.show()
In fact if your print(y_sin/y_lin) you just get an array of 1's because the computer does
not have the precision to do any better. I think even at small values of it is not the case
that , but it is very close. So in reality, even for tiny :
But, the following does hold:
The following also hold:
"Continuous" In Terms Of Limits
Continuous At A Point
A function is continuous at a point if it can "be drawn without taking the pen off the
paper" [Ref]. This means, more formally, that
a function is continuous at if .
As Adrian Banner says in his book "The Calculus Lifesaver", it is continuity that connects
the "near" with the "at" in terms of limits. It is what allows us to find
limits by direct substitution.
Continuity Over An Interval
If a function is continuous over the interval [a, b]:
The function is continuous at over point in (a,b).
The function is right-continuous at x = a: and exists.
The function is left-continuous at x = b: and exists.
Intermediate Value Theorem
If is a function continuous at every point of the interval , then:
will take on every value between and over the interval, and
For any between the values and , there exists a such that
Min/Max Theorem
If is continuous on [a,b], then has at least one maximum and one minimum on [a,b].
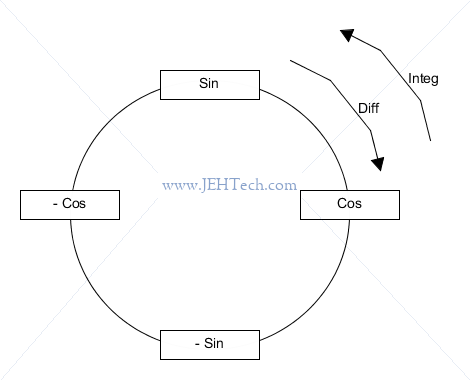
Differentiation
Definition
Recall that a function is continuous at a point if it can "be drawn without taking the pen off the
paper" [Ref]. This means, more formally, that
a function is continuous at if .
For a function to be differentiable at a point, it must be continuous at that point....
The derivative of a function with respect to it's variable is defined
by the following limit, assuming that limit exists.
If the limit does not exist the function does not have a derivative at that point.
This is why, for example the function does not have a defined derivative
at , because the limit (of the differentiation) does not exist at that point.
The function is continuous at that point because the left and right limits are the same, but the derivative function does not exist.
A function is continuous over an interval if:
it is continuous at every point in ,
it is right-continuous at , i.e.,
it is left-continuous at , i.e.,
If a function is differentiable then it must also be continuous.
If is replaced with we would write
Where just means a "small change in". This small change in leads
to a small change in , which is given by . Therefore we can
write:
I.e, if can be written as .
Now at school, as we'll see in the integration by parts section, sometimes was treated as a fraction although my teacher always said that it wasn't a fraction. The above,
which I didn't know at the time, explains why. And, finally, in the awesome book "The Calculus
Lifesaver" by Adrian Banner [Ref] I know why :)
Unfortunately neither or means anything by itself ...
... the quantity is not actually a fraction at all - it's the limit of the fraction as .
Example
We can use the definition above to take the derivative of :
We know that this limit exists because the function is continuous by virtue of it being
a polynomial. We also know that is tending to zero, so those terms just dissapear,
which leaves us with...
Thus,
Basic Differential Coefficients
Chain Rule
Using this when you need to differentiate a function that is made up
of the result of one function passed into the next and so on. I.e. if
.
Quotient Rule
When you have a function that can be expressed as a fraction,
use the quotient rule to allow you do differentiate and independently (easier!)
and the combine the results using this rule. becomes and becomes :
Example
Solve the following:
To do this we note that it is of the form where:
So we can calculate:
Plugging these into the quotient rule formula we get,
Product Rule
Use the product rule when trying to differentiate a quantity that is the
multiplication of two function. I.e when trying to find the derivative of
when . One of these functions becomes , the
other . Use this so you can differentiate the simpler functions and
independently and then combine the results.
For two functions...
Or for three functions...
Or, even, for any number of funtions...
... add up the group times and put a in front of a different variable in each term ...
The following is a really cool visual tutorial by Eugene Khutoryansky...
Example
A fairly simple example - find the derivative of . Okay, so we could just expand this out but it would
be pretty tedious. The product rule help make it easier!
In this case if we let and , then we can write ,
which is in the exact pattern we need for the product rule where we will label as and as :
We can find their derivatives as follows. Let .
And ...
Therefore...
Let .
And...
Therefore...
Now that we have the above we can use the product rule:
Integration
Basic Integrals
Integration Of Linear Factors
Use variable substitution, for example, if the integral is
Then put , giving...
But now we need to integrate with respect to , not !. In other words we need to go from the above integral to
something like,
We can use the chain rule as follows...
By integrating both sides of the equation with respect to we get....
We now have an integral of some function with respect to . We can find
from the definition of the original integral (just differentiate both sides!). We can find
by firstly rearranging to...
Then take the derivative with respect to to get
Notice how, that because the "thing" (factor) that is raised to a power in the integral is a linear function, the terms
will always dissapear, leaving only a constant, which can be differentiated w.r.t . If terms remained after differentiating
the "thing" (factor), it would stop us doing our desired integration w.r.t !
Now we can see that...
Substitute this into our integral and we have...
This we know how to integrate the above using the list of standard integrals.
Now we can substitute back in for to obtain the answer
One point to note is as follows. I always remember being taught to re-arrange the substitution that was made...
To...
..And then subsitute for the term in the integral. However, this is not strictly correct as far
as I understand because a differential coefficient is not a fraction... it is a limit:
So, as we can see is not really a fraction... hence the above method and explanation,
even if the "trick" I was taught works.
 Consider summing the numbers in the series
Consider summing the numbers in the series